Poslamaýan polatdan turba turbalary

Awtomatiki duzlama bejergisiniň artykmaçlyklary we ösüş tendensiýasy
Awtomatlaşdyrylan duzlama ýerüsti bejeriş enjamlarynyň adaty duzlama usullarynyň we kislotasyz bejeriş usullarynyň deňeşdirip bilmeýän artykmaçlyklary bar:
★Surfaceeriň hili gowy—— ulanylýan serişde henizem kislotadyr, şonuň üçin ýeriň hili adaty duzlamagyň artykmaçlyklaryny saklaýar
★Awtomatiki önümçilik—— üznüksiz awtomatiki önümçilik, ýokary önümçilik netijeliligi, uly önüm, dürli proses parametrleri kompýuter tarapyndan dolandyrylýar, önümçilik awtomatiki usulda amala aşyrylýar.Bu proses durnukly, esasanam uly göwrümli, merkezleşdirilen önümçilik üçin amatly
★Önümçiligiň pes bahasy—— prosesiň parametrlerine awtomatiki gözegçilik, önümçilik prosesi amatly we täsirli önümçilik media dolanyşygy bilen optimallaşdyrylyp bilner.Halkanyň ulanylmagy, awtomatiki önümçilik işgärleriň çykdajylaryny netijeli azaldyp biler.Bu faktorlar awtomatiki duzlama enjamlaryny edýär.Enjamlaryň işleýiş bahasy adaty duzlamadan has arzan
★Daşky gurşawyň hapalanmagy—— Awtomatlaşdyrylan duzlaýyş enjamlary, öz enjamlarynyň aýratynlyklary bilen utgaşyp, ösen galyndy suwlary we galyndylary arassalaýjy enjamlar bilen enjamlaşdyrylyp bilner, zawodyň we onuň daş-töweregine az mukdarda zyňyndylary we minimal hapalanmagy üpjün ediň.Esasanam kislota dumanlaryny bejermek we suw bilen bejermek üçin.Beýleki tarapdan, kislotany täzeden dikeltmek we hapa suwlary arassalamak enjamlary bilen enjamlaşdyrylan bolsa, zyňyndylaryň nol derejesine ýetip bolar.
Tehnologiýanyň ösmegi bilen awtomatlaşdyrylan duzlama enjamlary kem-kemden logistika yzarlamasy, MES, ERP we beýleki ulgamlar bilen üznüksiz baglanyşygy amala aşyrar.Senagat 4.0, maşyn görmek, bulut uly maglumatlary we beýleki tehnologiýalar bilen has ýokary intensiw, awtomatlaşdyrylan we köp görnüşli önümçilige ýetip, kärhana uly ykdysady peýdalar getirip biler.
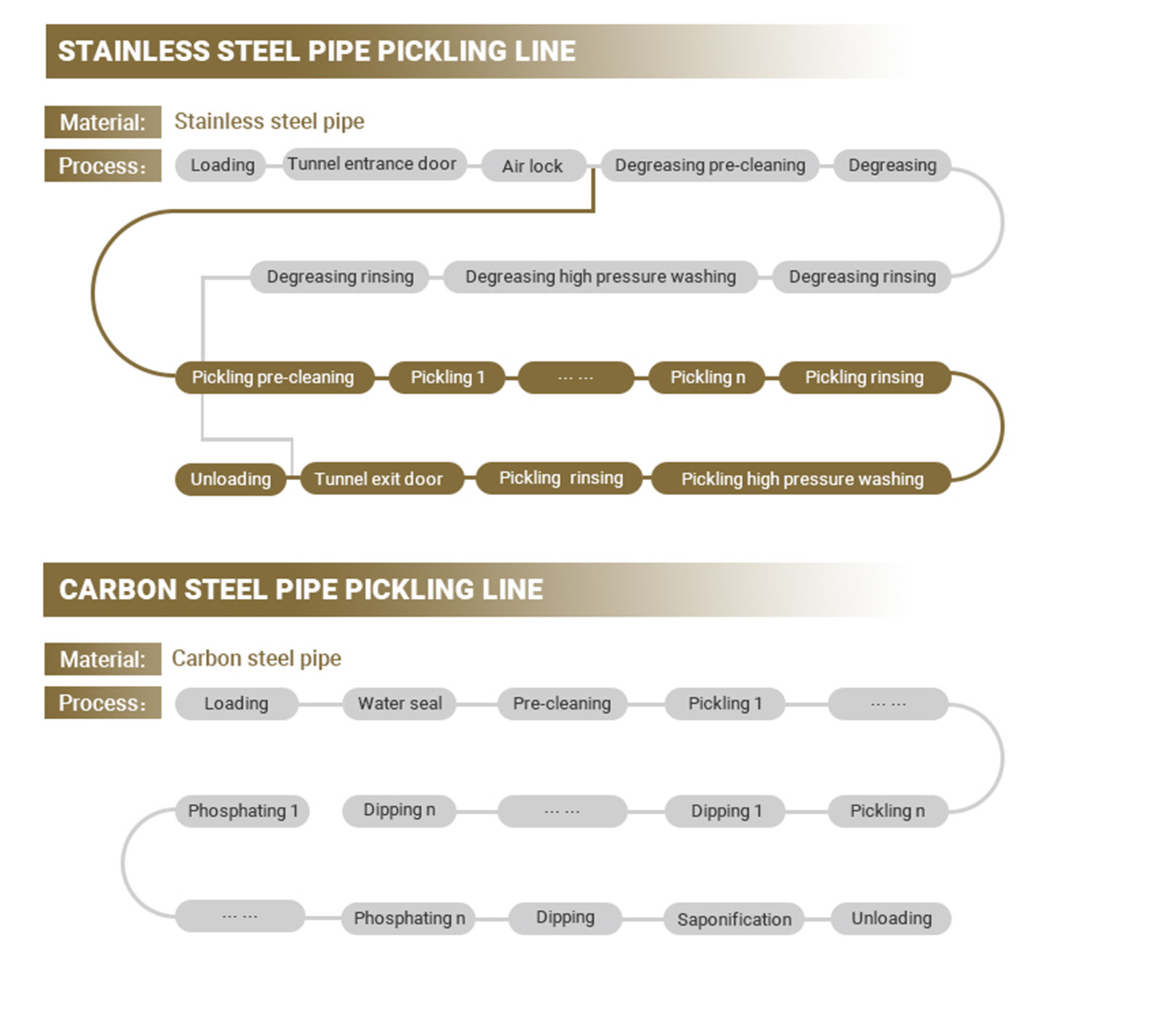
Adaty proses konfigurasiýasy
Aýratynlyklary
★ Ösen we ygtybarly manipulýator
• Bu görnüşli önümçilik liniýasynyň üznüksiz işlemegi üçin ýörite işlenip düzülen ýörite elektrik göteriji enjam;
• 4 motorly hereketlendiriji enjamy ulanmak, sinhron işlemek, çalt başlamak we ygtybarly tormozlamak;
• Robot goly rahat we pes ses bilen işleýän köp ugurly gurluşy kabul edýär;
• Göçürilýän kasna çarçuwasy, manipulýatoryň titremezden ýokary galmagyny we düşmegini üpjün etmek üçin 3 gollanma tigir mehanizmi bilen 2 × 3 gurluşy kabul edýär;
• Manipulýatoryň howpsuz işlemegini we işgärleriň şahsy howpsuzlygyny goramak üçin birnäçe howpsuzlygy kesgitleýji datçikler bilen enjamlaşdyrylan;
• specialöriteleşdirilen mehaniki gurluş, bölekleriň uzak ömri, aňsat tehniki hyzmat we abatlaýyş we bölekleri çalt çalyşmak.
★ Ykjam ýerleşiş, polat gurluşynyň zawod önümçiligi, ýokary güýçli bolt birikmesi
• Bejeriş maýa goýumlaryny saklamak we tygşytlamak aňsat;
• Adaty kebşirlemekden has güýçli, polat gurluş stresiniň täsirini doly ýok ediň;
• Enjam daşky görnüşi bilen ajaýyp, gurmak aňsat we gurluşyk döwründe gysga.
★ Duzlamak daşarky aýlanyş tehnologiýasyny kabul edýär
• Arassalamak we hyzmat etmek üçin amatly duzlaýjy bakda ýylylyk çalşygy elementi ýok;
• Daşarky aýlanyş süzgüç tehnologiýasy tanky arassa saklaýar we kislota erginindäki galyndylary çalt arassalap biler;
• Dinamiki turbulent duzlama duzlama täsirini we duzlamagyň netijeliligini ýokarlandyrýar.
★ waterokary netijelilikli suw aýlanyşygy we suw tygşytlaýjy arassalaýyş dizaýny
• Oýlap tapyş patent tehnologiýasy;
• Kaskadly suw aýlanyşyny ters arassalamak;
• flowokary akym tizligi we swing arassalamak polat turbanyň üstüni has netijeli arassalap biler;
• Dinamiki ýuwmagy amala aşyryň we arassalama täsirini gowulandyryň;
• Suwuň az sarp edilmegi, ulanyjylaryň ykdysady peýdalaryny gowulandyryp, galyndy suwlaryň akdyrylmagyny aňladýar.
★ Ösen we amatly dolandyryş ulgamy we ygtybarly programma dizaýny
• Çaknyşyk hadysalarynyň öňüni almak üçin fotoelektrik datçigiň, ýakynlyk wyklýuçateliniň we ýerleşiş datçiginiň programma üpjünçiligi algoritmi bilen birleşdirilmegi;
• positionokarky ýerleşiş takyklygy, ýerleşiş ýalňyşlygy ≤ 5mm;
• Görýän zadyňyz, alýan zadyňyz: HMI-de displeýiň ýagdaýy we ýagdaýy, enjamyň işleýiş ýagdaýyna düşünmek üçin amatly bolan meýdan enjamlarynyň ýagdaýy bilen birmeňzeşdir;
• Şahsy betbagtçylyklardan gaça durmak we işgärleriň howpsuzlygyny üpjün etmek üçin berk howpsuzlyk gözegçiligi we howpsuzlyk datçigi konfigurasiýasy;
• Iýmitlenende, operator degişli önümçilik prosesine awtomatiki gabat gelmek üçin materialyň görnüşine görä HMI ýükleýän materialy basyp biler;
• Tehniki önümleriň köp görnüşini gaýtadan işlemäge has gowy uýgunlaşmak üçin amal proseduralaryny üýtgedip we goşup bilerler;
• WIFI signalynyň öçmejekdigini we enjamyň kadaly işlemegini üpjün etmek üçin ösen köp nokatly WIFI AP funksiýasy;
• zatlaryň interfeýsi, bulut platformasyna gözegçilik, jübi telefony we planşet uzakdan onlaýn bolup biler (opsiýa);
• MES ulgam interfeýsi goralandyr we önümçiligi dolandyrmak üçin amatly bolan bu enjam bilen MES ulgamy üznüksiz birikdirilip bilner.